Wegen seiner Kompaktheit kann C.H.I.P. dann sehr gut als Sensor-Knoten eingesetzt werden, wenn es nicht auf minimalen Stromverbrauch ankommt.
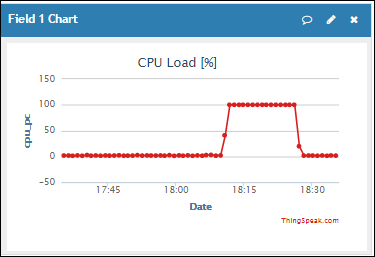
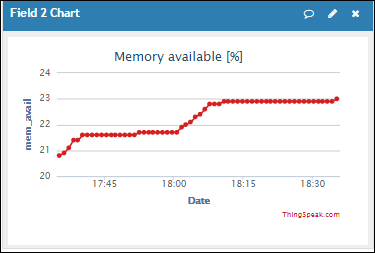
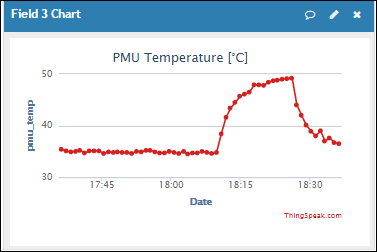
Für erste Tests habe ich mit dem Program chiplog.py die CPU-Last, den verfügbaren Speicher und die Boardtemperatur abgefragt und über Thingspeak visualisiert. Ausserdem wird beim Überschreiten der Temperatur eine Push-Message versendet. Mit dem Programm stress habe ich die CPU-Last erhöht, um die Auswirkungen auf die Boardtemperatur zur verdeutlichen.
Um einen externen Sensor abfragen zu können, bedarf es nur noch weniger zusätzlicher Zeile Code, die für einen Temperatur- und Feuchtigkeitssensor SHT31 noch folgen.
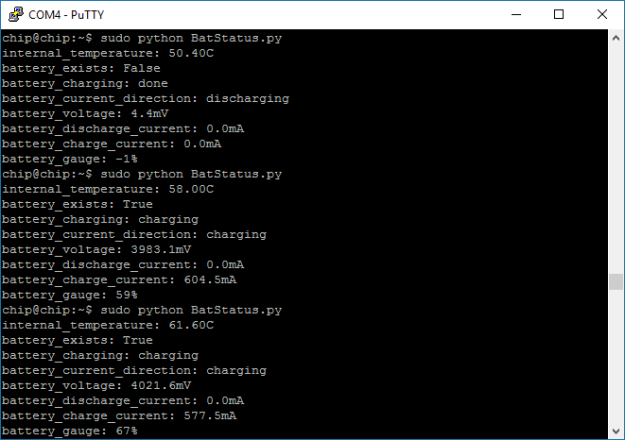
Das Programm BatStatus.py zeigt den Status der Batterie in den ersten Minuten nach dem Anschliessen an den C.H.I.P. Controller.
Die Programme chiplog.py und BatStatus.py sind auf Github abgelegt. Im Wiki sind Installationshinweise nach einem Flashen des Betriebssystems und dem erforderlichen Python-Setup aufgeführt.