Das belgische Unternehmen DPTechnics BV bietet eine Reihe von IoT-Bauteinen an, zu denen ein bemerkenswertes Board namens Walter gehört. Das Controllerboard ist ein „Open-Source-Multifunk-IoT-System-on-Module“, das einen ESP32-S3-Mikrocontroller mit einem LTE-M/NB-IoT-Modem und einem GNSS-Empfänger kombiniert.
Walter Board
In einem in der Zeitschrift Elektor Heft 07/08 2026 S. 28-33 veröffentlichten Beitrag wird gezeigt, wie einfach sich damit Messwerte von angebundenen Sensoren visualisieren lassen.
In einem zweiten Teil dieses Beitrags wird der Zugriff auf Wetter- und Datendienste im Internet beschrieben.
Mit meinem LinkedIn-Account gab es einige technische Probleme, weshalb ich diesen neu aufsetzen musste. Sie erreichen mich neu unter der folgenden URL:
In den vergangenen Wochen haben die Temperaturen vielerorts wieder die 30-Grad-Marke überschritten.
Wer keine Klimaanlage besitzt, kennt das Problem: Bereits am Vormittag wird es in der Wohnung unangenehm warm, und am Nachmittag stellt sich immer wieder die gleiche Frage:
Soll ich jetzt das Fenster öffnen oder lieber geschlossen halten?
Viele Menschen lüften nach Gefühl oder weil „frische Luft“ grundsätzlich als gut empfunden wird. An heißen Sommertagen kann das jedoch genau das Gegenteil bewirken: Ist die Außenluft wärmer als die Raumluft, gelangt zusätzliche Wärme ins Gebäude und die Räume heizen sich noch schneller auf.
Eigentlich ist die Entscheidung ganz einfach: Gelüftet werden sollte nur dann, wenn die Außentemperatur niedriger ist als die Innentemperatur. Doch wer läuft schon ständig mit zwei Thermometern zwischen Wohnung und Garten oder Balkon hin und her?
Genau hier setzt das Projekt der intelligenten Lüftungsampel an. Zwei kleine Funkknoten messen kontinuierlich die Innen- und Außentemperatur und zeigen auf einen Blick an, ob Lüften sinnvoll ist oder ob die Fenster besser geschlossen bleiben sollten.
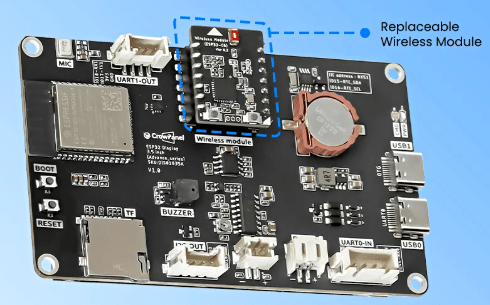
Wer nach einer flexiblen IoT-Plattform sucht, die sich nicht auf einen einzigen Funkstandard festlegt, sollte sich das CrowPanel Advance HMI ansehen. Das Besondere an diesem Gerät ist nämlich nicht nur das brillante Touchdisplay oder der leistungsstarke ESP32-S3, sondern vor allem das modulare Funkkonzept.
Ein Display für alle Fälle
Das CrowPanel Advance HMI 3.5″ kombiniert einen ESP32-S3 mit einem 3,5-Zoll-IPS-Touchscreen im Format 480 × 320 Pixel. Das große Display bietet ausreichend Platz für komplexe Benutzeroberflächen, Statusanzeigen, Sensordaten oder Kartenansichten. Im Vergleich zu den oft verwendeten kleinen OLED-Displays wirkt die Bedienung deutlich komfortabler.
CrowPanel Advance HMI gibt es in den Grössen 10″, 7″, 5″, 4.3″, 3.5″ und 2.8″.
Doch das eigentliche Highlight befindet sich auf der Rückseite.
CrowPanel Advance HMI 3.5″ Rückseite
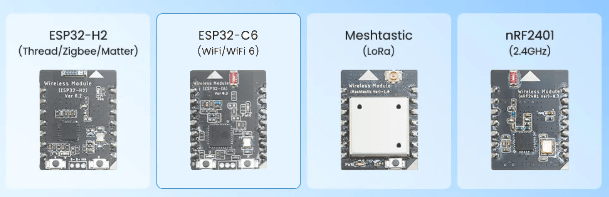
Funktmodule
Funkmodule nach Bedarf austauschen
Während viele Entwicklungsboards bereits auf einen bestimmten Funkstandard festgelegt sind, verfolgt Elecrow einen anderen Ansatz. Die Funkkommunikation erfolgt über austauschbare Module. Dadurch kann dieselbe Hardwareplattform für unterschiedliche Anwendungen genutzt werden.
Je nach Projekt lassen sich beispielsweise Module für folgende Technologien einsetzen: LoRa, Zigbee, Thread, Matter, WiFi HaLow und weitere zukünftige Funkstandards
Statt für jedes Projekt neue Hardware zu kaufen, genügt häufig ein Wechsel des Kommunikationsmoduls.
Meshtastic als praktisches Beispiel
Ein besonders interessantes Einsatzgebiet ist Meshtastic. Hier wird ein LoRa-Modul auf Basis des SX1262 eingesetzt. Nach dem Flashen der Meshtastic-Firmware verwandelt sich das CrowPanel in einen vollwertigen Mesh-Knoten.
Gerade bei Meshtastic zeigt sich der Vorteil des großen Displays:
Nachrichten sind komfortabel lesbar.
Node-Informationen können übersichtlich dargestellt werden.
Karten und Positionsdaten profitieren von der größeren Anzeigefläche.
Die Touchbedienung ermöglicht eine intuitive Nutzung direkt am Gerät.
Das CrowPanel wird damit zu einer Art mobilen Meshtastic-Terminal, ohne dass zusätzliche Smartphones oder Tablets zwingend erforderlich sind.
Mehr als nur Meshtastic
Interessant wird die Plattform vor allem dann, wenn sich die Anforderungen ändern.
Heute dient das CrowPanel vielleicht als Meshtastic-Knoten im LoRa-Netzwerk. Morgen könnte dasselbe Gerät durch Austausch des Funkmoduls Teil eines Zigbee-Smart-Home-Systems werden oder als Matter-Gateway fungieren.
Dadurch eignet sich das CrowPanel besonders für Maker, IoT-Entwickler, als Experimentierplattform und für Schulungs- und Lernumgebungen
Antenne im Praxistest
Beim Einsatz als Meshtastic-Node wird sich noch zeigen müssen, wie gut die mitgelieferte LoRa-Antenne performt. Das modulare Konzept überzeugt bereits jetzt, die tatsächliche Funkreichweite hängt jedoch maßgeblich von der Qualität der Antenne und den lokalen Gegebenheiten ab. Hier stehen noch ausführliche Feldtests aus.
Fazit
Das CrowPanel Advance 3.5″ ist weniger ein klassisches Meshtastic-Gerät als vielmehr eine vielseitige Kommunikationsplattform. Meshtastic dient dabei als anschauliches Beispiel dafür, wie flexibel sich das System einsetzen lässt.
Der eigentliche Mehrwert liegt in den austauschbaren Funkmodulen. Wer gerne mit verschiedenen Technologien experimentiert oder eine Hardwarebasis für unterschiedliche IoT-Projekte sucht, erhält mit dem CrowPanel eine ungewöhnlich flexible Lösung. Das große IPS-Touchdisplay und der leistungsstarke ESP32-S3 runden das Gesamtpaket ab und machen das Gerät zu weit mehr als nur einem weiteren LoRa-Node.
Die heißen Sommertage sind vorerst vorbei. Viele Menschen stellen fest, dass sie bei moderateren Temperaturen wieder besser schlafen können. Doch auch wenn die größte Hitzebelastung hinter uns liegt, bleibt die Schlafumgebung ein entscheidender Faktor für die Schlafqualität.
Ein erholsamer Schlaf wird von zahlreichen Einflüssen bestimmt. Neben persönlichen Faktoren wie Stress, Bewegung oder Ernährung spielen die Bedingungen im Schlafzimmer eine wichtige Rolle. Dazu gehören insbesondere die Raumtemperatur, die Luftfeuchtigkeit und die allgemeine Luftqualität.
Die richtige Raumtemperatur
Schlafforscher empfehlen für die meisten Menschen eine Schlafzimmertemperatur zwischen 16 und 19 Grad Celsius. Ist es deutlich wärmer, fällt das Einschlafen häufig schwerer und die nächtlichen Wachphasen nehmen zu. Gerade in den Sommermonaten kann dies zu einer spürbar schlechteren Schlafqualität führen.
Luftfeuchtigkeit und Raumklima
Auch die Luftfeuchtigkeit beeinflusst das Wohlbefinden während der Nacht. Zu trockene Luft kann die Schleimhäute reizen, während eine zu hohe Luftfeuchtigkeit das Raumklima als unangenehm erscheinen lässt. Regelmäßiges Lüften und eine gute Luftzirkulation tragen wesentlich zu einem angenehmen Schlafklima bei.
Die Erfassung solcher Umgebungsdaten ermöglicht es, Zusammenhänge zwischen Schlafqualität und den Bedingungen im Schlafzimmer sichtbar zu machen. Oft werden Veränderungen erst dann erkennbar, wenn die Messwerte über längere Zeiträume aufgezeichnet und ausgewertet werden.
Schlafqualität messen und verstehen
Moderne Sensorik ermöglicht heute interessante Einblicke in die eigene Schlafumgebung. Temperatur-, Feuchte- und Luftdrucksensoren liefern wertvolle Daten zu den Bedingungen während der Nacht. In Verbindung mit geeigneten Auswerteverfahren lassen sich Trends und Auffälligkeiten erkennen, die mit der Schlafqualität zusammenhängen können.
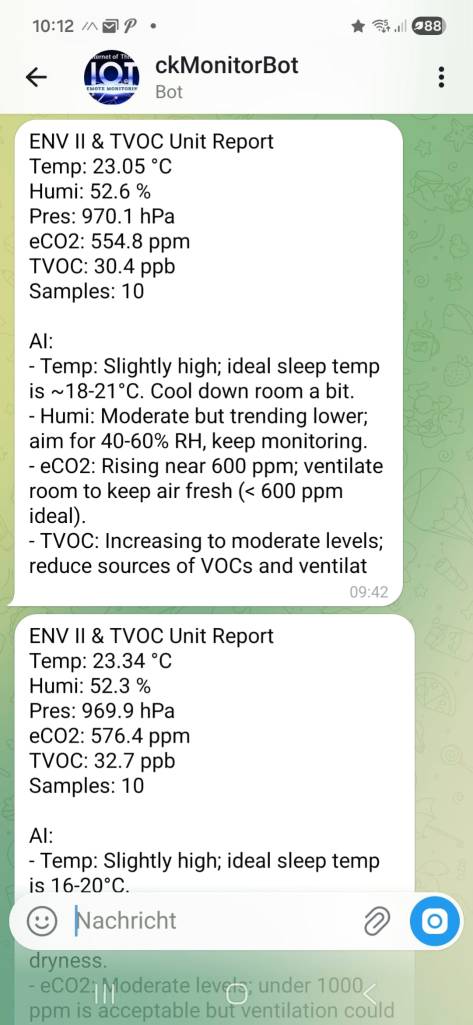
In meinem neuen Buch MicroPython – Das Handbuch für Maker und IoT-Development stelle ich unter anderem einen Schlafmonitor vor, der Umgebungsdaten erfasst und die Ergebnisse mithilfe künstlicher Intelligenz bewertet. Die Auswertungen werden anschließend automatisch über Telegram bereitgestellt (siehe Abbildung). Dadurch erhält der Anwender eine kompakte Einschätzung der nächtlichen Bedingungen.
Der vorgestellte Monitor konzentriert sich bewusst auf die Erfassung von Temperatur, Luftfeuchtigkeit, Luftdruck, eCO2 und TVOC. Die Lösung ist jedoch modular aufgebaut und kann bei Bedarf um weitere Sensoren erweitert werden. Denkbar sind beispielsweise Messungen von Lichtverhältnissen, Geräuschpegeln u.a.m.
Fazit
Guter Schlaf hängt nicht allein von der Schlafdauer ab. Die Qualität der Schlafumgebung hat einen erheblichen Einfluss auf die nächtliche Erholung. Wer Temperatur, Luftfeuchtigkeit und weitere Umweltfaktoren im Blick behält, kann die Bedingungen im Schlafzimmer gezielt optimieren.
Für Technikinteressierte bieten Mikrocontroller und moderne Sensoren spannende Möglichkeiten, die eigene Schlafumgebung besser zu verstehen. Mein neues Buch zum Thema MicroPython, das Anfang August im Rheinwerk-Verlag erscheint, zeigt anhand praxisnaher Projekte, wie sich solche intelligenten Mess- und Auswertungssysteme realisieren lassen.
Python gehört schon seit Jahren zu den beliebtesten Programmiersprachen überhaupt. Die von Python zur Verfügung gestellten Eigenschaften stellen Anforderungen an die Hardware, die von Mikrocontrollern nicht ohne Weiteres erfüllt werden können. Ein PC kann das. Ein Raspberry Pi mit Linux als Betriebssystem kann das, ein Mikrocontroller wie ein Espressif ESP32, ein Nordic nRF52840, ein STM32 oder eines der verschiedenen Arduino-Boards hingegen nicht.
Das hat Damien P. George, einen Physiker und Softwareentwickler aus Cambridge (UK), im Jahr 2013 dazu bewogen, MicroPython zu entwickeln. Ziel der Entwicklung von MicroPython war, eine voll funktionsfähige, aber kompakte Version von Python 3 zu schaffen, die auf Mikrocontrollern (wie STM32, ESP8266, ESP32, RP2040 usw.) läuft. Mit diesem Buch werden Sie die Gemeinsamkeiten und Unterschiede von Python und MicroPython kennenlernen und schließlich in der Lage sein, mit MicroPython auf recht kleinen Mikrocontrollern zu arbeiten.
Aufbau eines BLE-Netzwerks für diverse Umwelt-Sensoren
Ziel des Projekts ist der Aufbau eines skalierbaren, extrem stromsparenden Sensor-Netzwerks zur Überwachung von Umgebungsdaten. Der NanoBeacon IN100 SoC von InPlay Inc. kommt im SparkFun NanoBeacon Board – IN100 und im DFRobot Fermion BLE Sensor Beacon zum Einsatz.
Das SparkFun NanoBeacon Board – IN100 kann durch Sensoren mit einem QWIIC-Interface erweitert werden. Beim Einsatz der Fermion-Baureihe von DFRobot können verschiedene Sensoren (u.a. LM35, SHT40, SGP40) direkt mit dem Fermion BLE Sensor Beacon kontaktiert werden.
In beiden Fällen ist eine drahtlose Vernetzung der so gestalteten BLE-Sensoren möglich. Die übermittelten Daten können von einem zentralen ESP32-Gateway ausgewertet und zur Langzeitanalyse an eine IoT-Plattform übermittelt werden.
Ich verwende MicroPython für die Programmierung des ESP32-Gateways. Auf der Sensor-Seite kommt der Fermion BLE Sensor Beacon zum Einsatz. Datacake dient in bewährter Weise als IoT-Plattform.
Systemarchitektur & Datenfluss
Das System nutzt eine dreistufige Architektur, um maximale Effizienz und Reichweite zu erzielen:
Sensor-Knoten (Edge): Mehrere Fermion BLE-Module fungieren als eigenständige Sender (Beacons). Sie erfassen analoge Signale (z-B. LM35) sowie digitale I²C-Daten (z.B. SHT40 für Feuchte/Temp, SGP40 für Luftqualität). Die Daten werden ohne festes Pairing direkt in die BLE Manufacturer Data (Advertising-Pakete) eingebettet.
Zentral-Gateway (Processing): Ein ESP32 scannt unter MicroPython kontinuierlich das BLE-Spektrum. Er identifiziert die Fermion-Knoten anhand ihrer IDs, extrahiert die Rohdaten aus den Manufacturer-Bytes und berechnet die physikalischen Einheiten. Die aktuellen Messwerte werden unmittelbar auf einem OLED-Display (SSD1306) am ESP32 angezeigt.
Visualisierung der aufbereiteten Daten und via MQTT an das Datacake-Dashboard versendeten Daten, wo sie für Monitoring, Alarme und Historien-Analysen zur Verfügung stehen.
Besondere Merkmale
Ultra-Low Power: Durch den Verzicht auf eine dauerhafte BLE-Verbindung (Broadcasting) erreichen die Sensor-Knoten Batterielaufzeiten im Bereich von Monaten bis hin zu Jahren.
Skalierbarkeit: Das System kann problemlos um weitere Knoten ergänzt werden, da der ESP32 als passiver Empfänger eine Vielzahl von Sendern gleichzeitig verarbeiten kann.
Robustheit: Die Trennung von Erfassung (Fermion) und Verarbeitung (ESP32/Cloud) ermöglicht einen stabilen Betrieb auch in komplexen Umgebungen.
Aufbau eines Sensor-Knotens
Der Fermion BLE Sensor Beacon ist ein drahtloser Beacon, der Sensordaten über Bluetooth sendet. Ein integrierter 11-Bit-ADC kann zur Erfassung analoger Messwerte eingesetzt werden und über das I2C-Interface können Sensoren mit I²C-Interface ausgelesen werden. Auf die vom Beacon gesendeten Sensordaten kann innerhalb der Sendereichweite des Beacons mit Mobiltelefonen, Mikrocontrollern und anderen Geräten, die den BLE-Empfang unterstützen, zugegriffen werden.
Fermion BLE-Sensor-Beacons integrieren stromsparende Bluetooth 5.3-Technologie mit selbstkonfigurierbaren Datenformaten wie iBeacon, Eddystone, benutzerdefiniert und mehr. Die BLE-Sensor-Beacons können mit einer CR2032-Knopfzellenbatterie betrieben werden. Es stehen bis zu sechs konfigurierbare GPIOs zur Verfügung, die alternativ auch zu zwei unabhängigen I²C-Schnittstellen konfiguriert werden können.
Fermion BLE-Sensor-Beacon
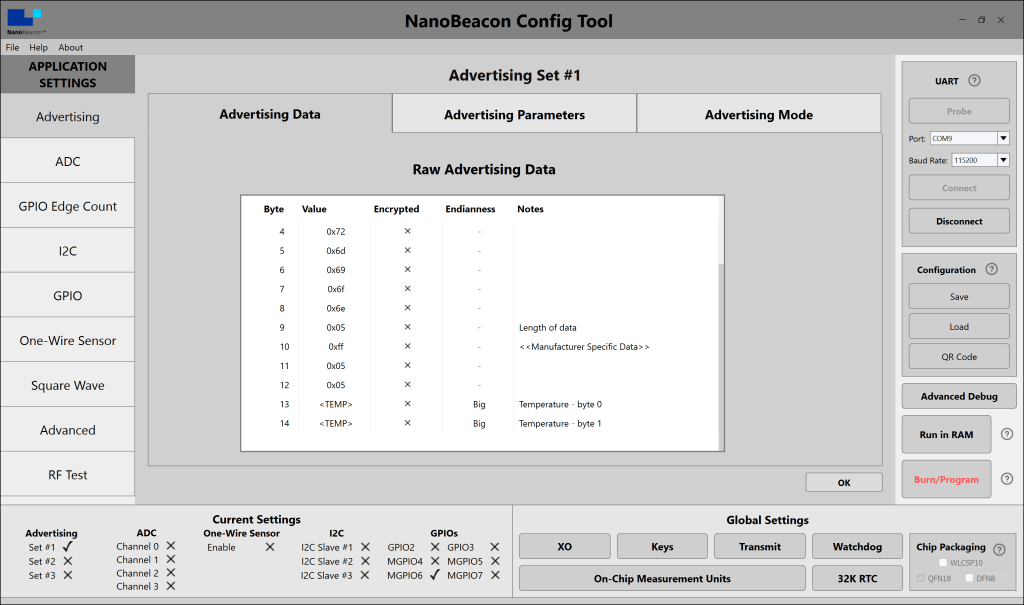
Das Datenformat der Beacon-Übertragung, der Inhalt der Übertragung, das Übertragungsintervall usw. können über die grafische Benutzeroberfläche NanoBeacon Config Tool konfiguriert werden, ohne dass für die Fertigstellung eines Bluetooth-Beacons die Programmierung von Code erforderlich ist.
NanoBeacon Config Tool
Für einen ersten Versuch wurde der Beacon so konfiguriert, dass die interne Temperatur (Chiptemperatur) mit zwei Byte in den Manufacturer-Daten verankert wurde. Im NanoBeacon Config Tool ist das mit den Bytes 13 und 14 zu sehen,
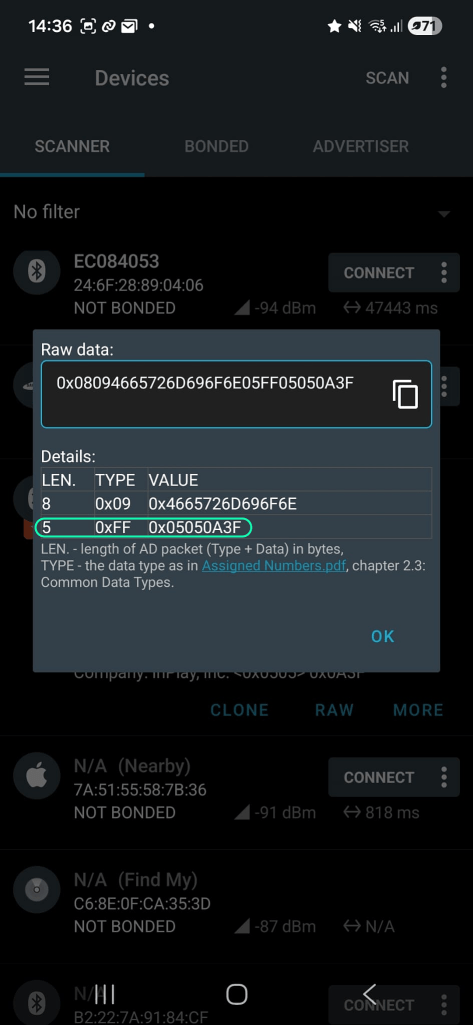
Für die Visualisierung der empfangenen Daten verwende ich das nRF-Tool. Im folgenden Screenshot sind die Manufacturer-Daten markiert. Nach dem Hersteller-Code 0x0505 stehen die Bytes 0x0A3F = 2623D = 26.23°C. Von einem BLE-Scanner bzw. BLE-Gateway sind die übermittelten Daten nur noch zu parsen und jegliches Geheimnis ist gelüftet.
Manufacturer Data
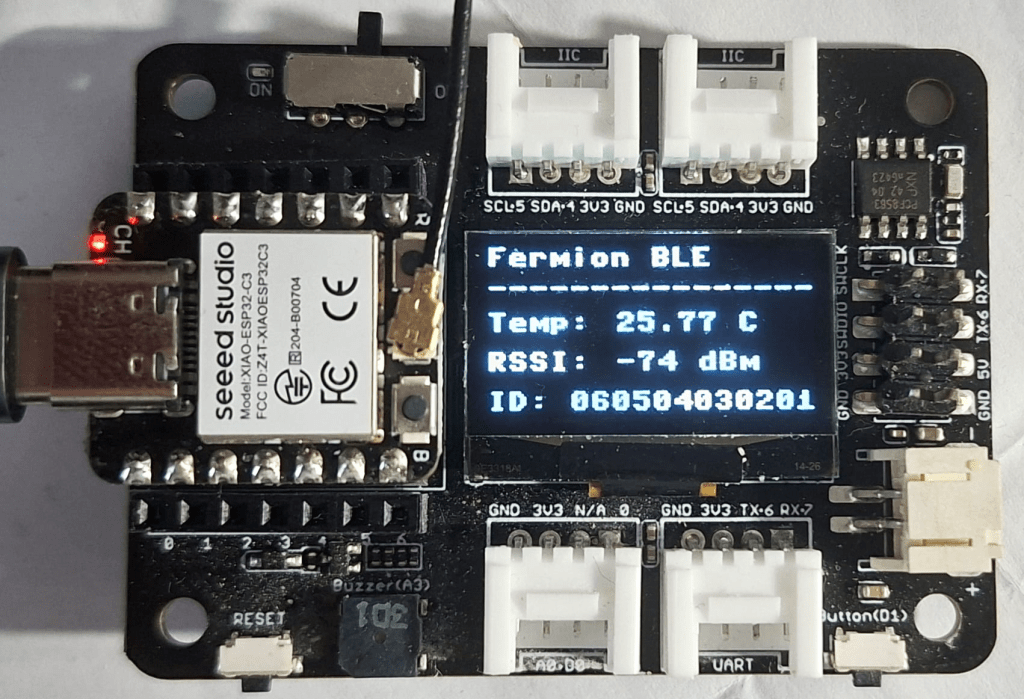
Zu Beginn habe ich der Einfachheit halber einen XIAO-ESP32-C3 auf einem XIAO-Erweiterungsboard als BLE-Scanner eingesetzt. Installiert ist die aktuelle MicroPython-Firmware v1.27.
Die MicroPython-Anwendung scannt die Umgebung nach Bluetooth-Signalen, die von Geräten wie Smartwatches, Fitness-Trackern, Sensoren oder Beacons ausgesendet werden, und identifiziert alle BLE-Geräte in Reichweite, die im Advertising-Modus Signale aussenden. Sie misst die Signalstärke (RSSI) und ruft Metadaten, darunter auch die Manufacturer-Daten, ab. In den Manufacturer-Daten ist hier der Temperaturmesswert verankert. Auf dem OLED-Display des XIAO-Erweiterungsboards werden diese Daten schließlich zur Anzeige gebracht.
BLE-Gateway mit ESP32-C3
Für den Einsatz in Innenräumen eignet sich das RAKBox-B3-Gehäuse, da es für die Sensorik gut belüftet ist und ausreichend Schutz der Komponenten sichert.
RAKBox-B3 Indoor Enclosure
In der nächsten Projektphase wird das System um Fermion-Sensoren sowie kommerzielle BLE-Geräte ergänzt. Dabei entwickeln wir den BLE-Scanner zu einem BLE-MQTT-Gateway weiter, um die erfassten Daten zur Visualisierung an die Datacake-Plattform zu übertragen.
Parallel dazu arbeite ich an einem Fachbuch über MicroPython im IoT-Umfeld. Darin finden Sie – neben einer fundierten Einführung in MicroPython für gängige Mikrocontroller – praxisnahe Anwendungen auf Basis von WiFi, Ethernet, ESP-Now und BLE.
Der Badger2350 von Pimoroni ist ein kompaktes, stromsparendes eInk-Badge-Board, das speziell für portable Anzeigen und langlebige IoT-Projekte entwickelt wurde. Statt auf hohe Rechenleistung oder Multimedia setzt die Hardware konsequent auf Effizienz, gute Lesbarkeit und extrem niedrigen Energieverbrauch – Eigenschaften, die in vielen Maker- und IoT-Szenarien entscheidend sind.
Durch das integrierte eInk-Display lassen sich Informationen dauerhaft anzeigen, ohne kontinuierlich Strom zu verbrauchen. In Kombination mit einfacher Programmierung in MicroPython, einer aktiven Entwickler-Community und zahlreichen Beispielprojekten eignet sich das Board sowohl für schnelle Prototypen als auch für produktive Anwendungen. Ob Statusanzeigen im Smart Home, digitale Labels oder batteriebetriebene Sensorstationen – der Badger2350 ist besonders dort interessant, wo Informationen sichtbar bleiben sollen, ohne dass ständig Energie fließt.
Pimoroni Badger2350
Badger2350 baut auf der folgenden Hardware auf:
2.7″ eInk-Display mit 264 x 176 Pixeln und vier Graustufen
Raspberry Pi RP2350A (Dual Arm Cortex M33 @ 250 MHz mit 520 KB 0SRAM)
16 MB Flash, 8 MB PSRAM
Raspberry Pi RM2 module (CYW43439) für IEEE 802.11 b/g/n WLAN & BT
1000mAh LiPo battery:
PCF85063A RTC für WakeUp von Sleep
Polycarbonate case
4-zone mono LED case lighting
Buttons: 5 User, Reset & Home
Connectors: USB-C zur Spannungsversorgung und Programm-Upload, I2C-Connector (Qwiic/STEMMA QT)
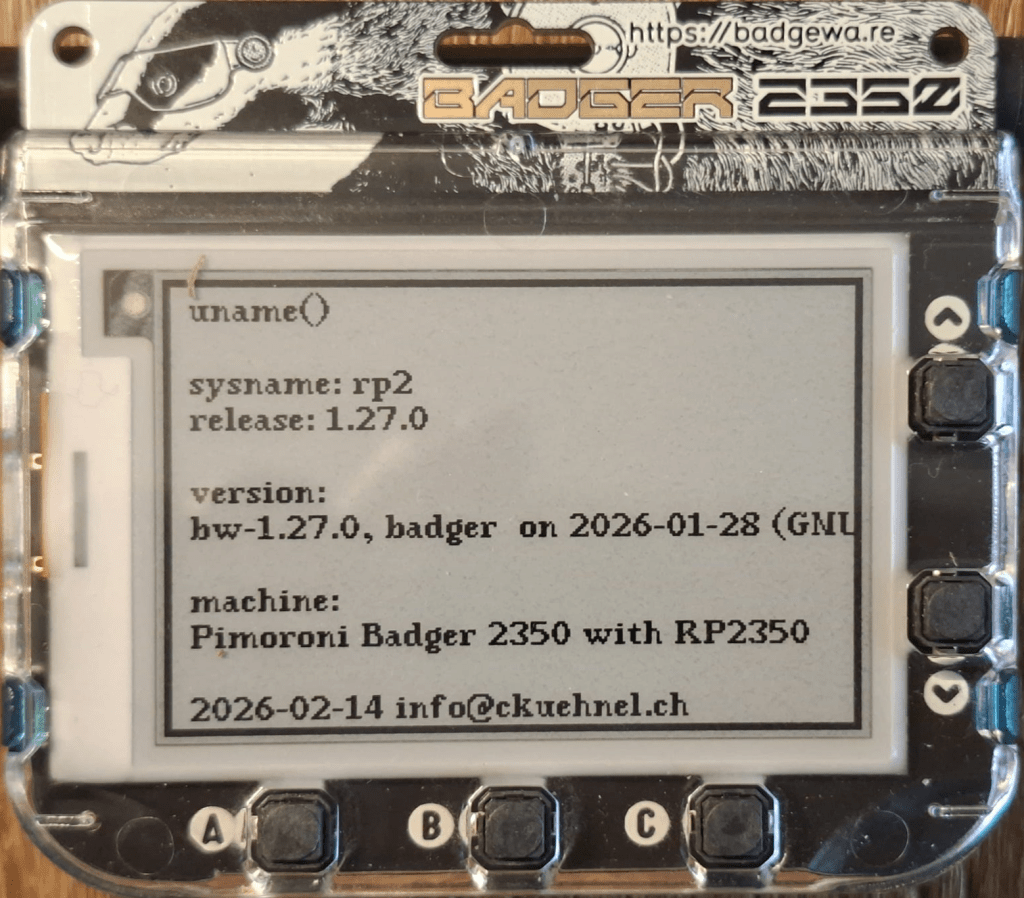
Für die Programmierung in MicroPython bietet Pimoroni eine spezielle Firmware an, die unter https://badgewa.re/docs beschrieben ist.
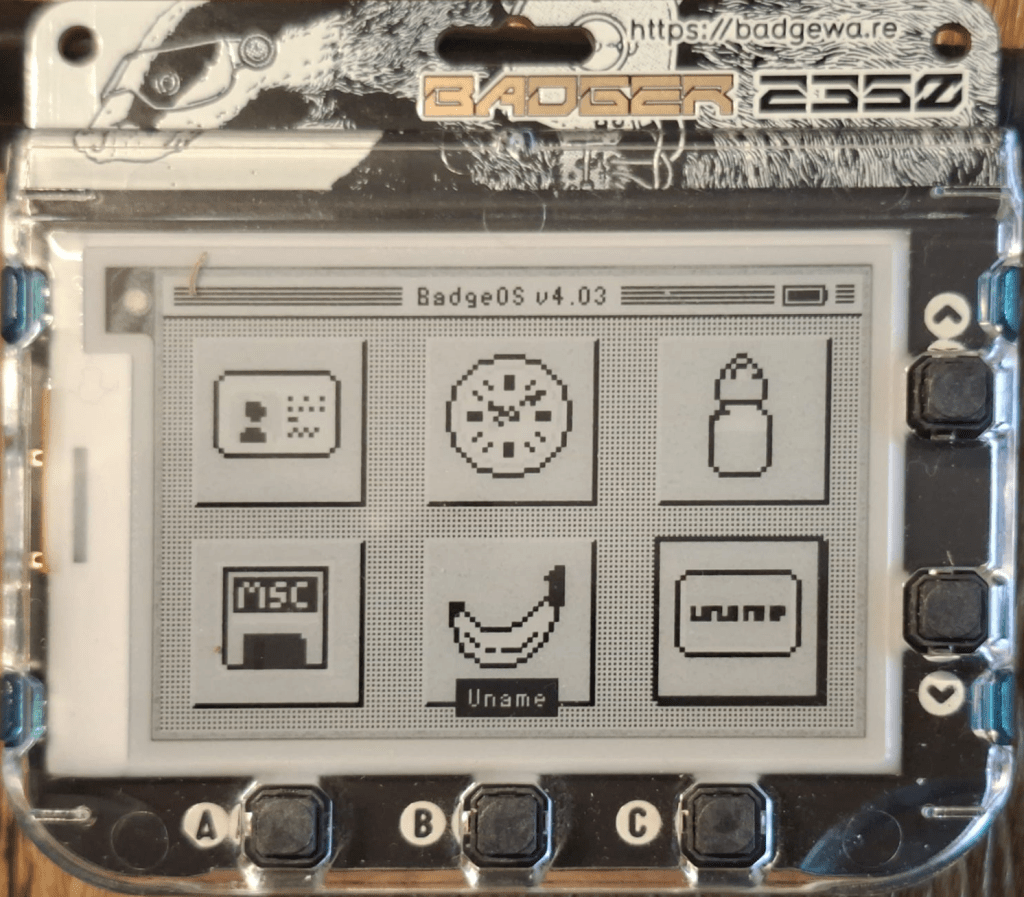
Ich habe einen ersten Test unternommen, um mit uname() dem System Informationen zu entlocken und das Programm in den bestehenden Launcher einzubinden.
Menu mit zusätzlicher AppApp uname
Wie Sie aus den beiden Abbildungen sehen, hat das der Dokumentation folgend auch alles funktioniert. Eine App kann in den Launcher eingebunden werden und dann von da aufgerufen werden, oder aber als main.py als eigenständige App arbeiten. Ich habe hier den ersten Weg gewählt.
Mir den Möglichkeiten, die der Badger2350 bietet, sind Anwendungen aus den folgenden Bereichen denkbar:
Monitoring von Umweltdaten mit lokalem Statusdisplay
Solarbetriebene Sensorstationen
Energieverbrauch (z. B. PV-Ertrag oder Stromzählerdaten)
MQTT-Dashboard für wichtige Zustände
Inventar-Tracking mit QR-Code auf eInk
Statusanzeigen für Funk-Gateways
u.a.m.
Der Badger2350 überzeugt vor allem durch seine klare Ausrichtung auf stromsparende Anzeige- und IoT-Anwendungen. Seine Stärken spielt das Board überall dort aus, wo Daten selten aktualisiert werden, aber dauerhaft sichtbar sein sollen: Statusanzeigen, Sensordashboards, digitale Labels oder portable Informationssysteme sind typische Einsatzfelder. Weniger geeignet ist es dagegen für grafikintensive Anwendungen oder Projekte mit schnellen Display-Updates.
KI ist in unseren Alltag eingedrungen und hilft an der einen und anderen Stelle. Um KI zu nutzen ist es aber nicht erforderlich, vor dem PC zu sitzen und Kontakt mit einer KI-Plattform, wie ChatGPT, Gemini o.a. aufzunehmen, sondern kann bestimmt Aufgaben bereits mit Mikrocontrollern automatisieren.
So können Sie beispielsweise einen Prompt erstellen, der Ihnen beim Zubettgehen die zu erwartenden Strassenverhältnisse am kommenden Morgen abfragt o.ä.
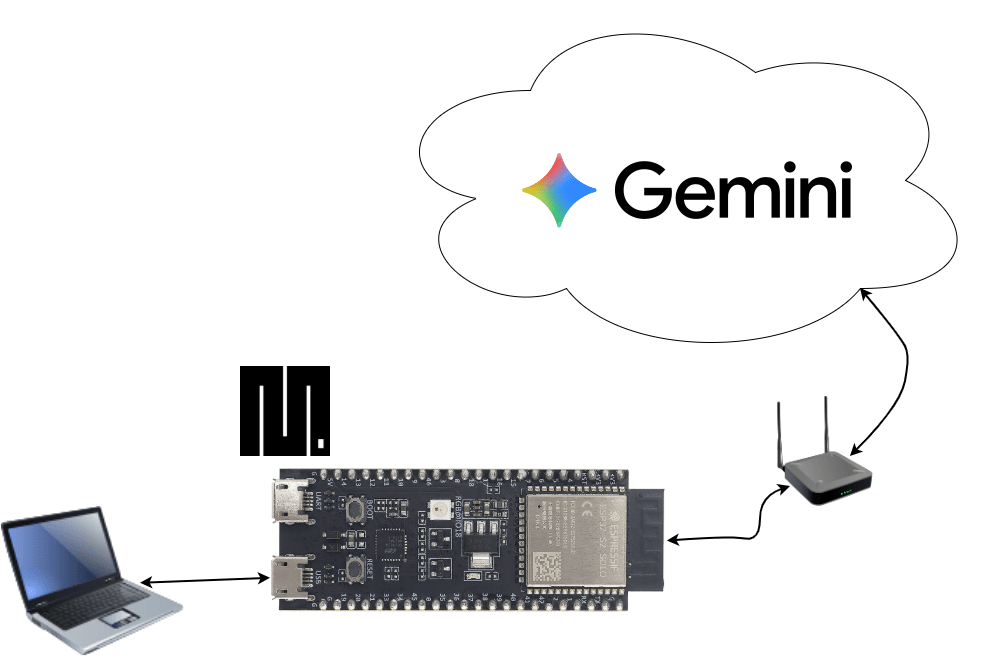
Alles, was dazu erforderlich ist, zeigt die folgende Abbildung. Natürlich können Sie den ESP32-S2 noch mit einem Display ausstatten, damit die Antwort adäquat präsentiert wird.
Ich habe einen mit MicroPython ausgestatteten ESP32-S2 mit Gemini verbunden und kann eine Anfrage senden, die von Gemini beantwortet wird.
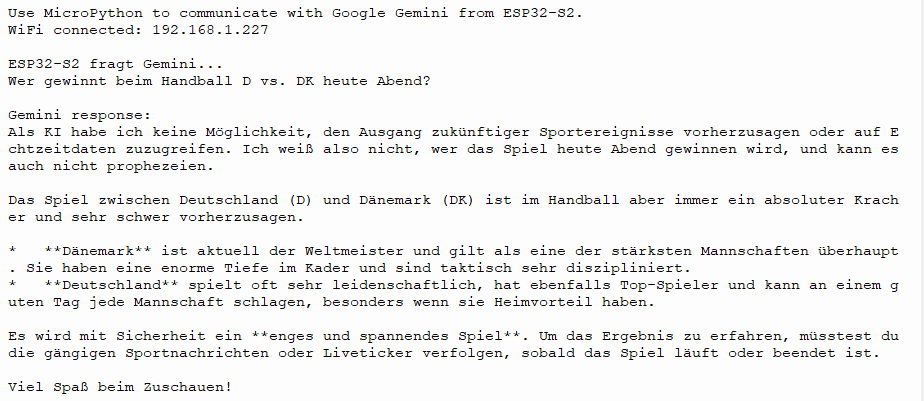
Für das bevorstehende Handballspiel D gegen DK habe ich die (nicht ganz ernstgemeinte) Frage nach dem Sieger gestellt. Die Antwort sehen Sie in der Ausgabe über die Console.
Ich werde mir das Spiel heute Abend anschauen.
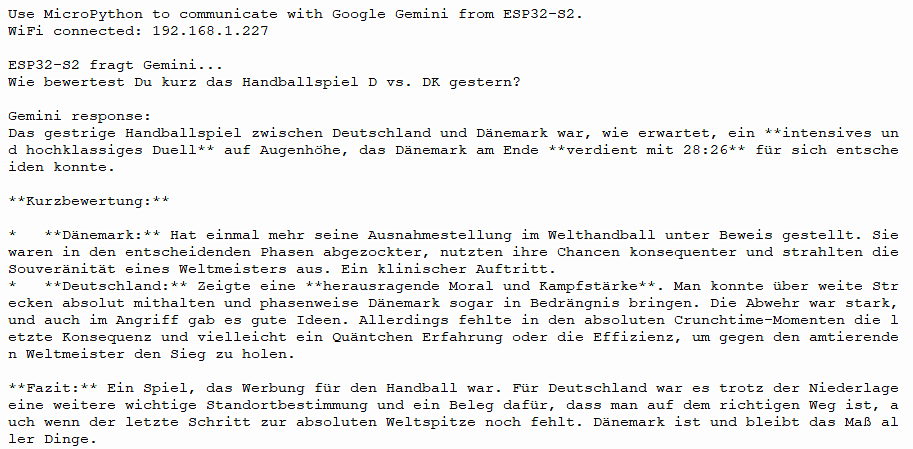
Das Resultat war aus deutscher Sicht ernüchternd – Gratulation an Dänemark zu einer starken Leistung. #Handball #EM2026
Auch Gemini hat eine Meinung dazu, die sich bei mehrfachen Anfragen aber durchaus unterscheidet: