Hier ist neben Informationen zum ADC, Stromverbrauch, Batterielaufzeit und Antennen eine Übersicht aktuell verfügbarer Meshtastic Knoten mit Preisen und Links zum Anbieter gelistet.
Im Beitrag „WisBlock von RAKwireless – IoT-Anwendungen einfach umgesetzt“, veröffentlich in ELEKTRONIK 26/2023, S. 44-50 und im elektroniknet.de, wird gezeigt, wie mit WisBlock-Komponenten das Erstellen von IoT-Anwendungen vom Proof-of-Concept über das Prototyping bis hin zum Industrieprodukt unterstützt wird.
Der auf WisBlock aufbauende SensorHub stellt eine Ausprägung dieses Konzeptes dar und ermöglicht als Low-Code-System eine schnelle Umsetzung von IoT-Applikationen.
In meinem Blogbeitrag Vermittlung digitaler Inhalte in der Schule hatte ich die das Informatikinteresse an den Schulen fördernden Mikrocontroller BBC micro:bit, Calliope mini, und Oxocard betrachtet.
Dieser Bereich ist nach wie vor in Bewegung, stellt doch die Digitalisierung in allen Lebensbereichen eine grosse Herausforderung dar.
Mit der Oxocard Mini Serie stellt die Schweizer Oxon AG Computerboards zur Verfügung, die das Eintauchen in Computergrafik und ihre zugrunde liegenden Algorithmen oder Spiele und Animationen mit ihren Quelltexten ermöglichen.
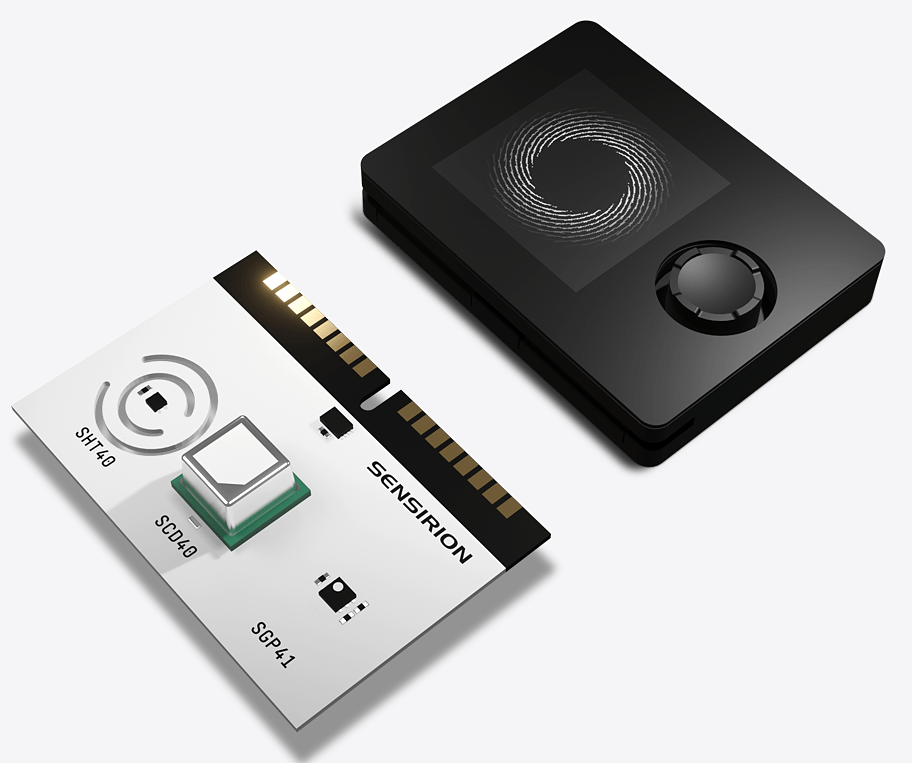
OxoCard (Mini) Science ist eine programmierbare Multisensorplatine, die mit Hilfe von sieben Sensoren die folgenden physikalischen Grössen erfasst: Licht/IR, Temperatur, Geräusche, Feuchte, Druck und flüchtige Kohlenstoffverbindungen (VoC, eCO2 und Ethanol). Auch hier steht der dokumentierte Quelltext zur Verfügung und eigene Experimente können gestartet werden.
Oxocard Science, Oxocard Galaxy & Oxocard Artwork
Das jüngste Kind der Oxocard-Familie ist Oxocard Connect – ein ebenfalls auf dem ESP32 aufbauendes und damit netzwerktaugliches Computermodul mit grafischem TFT-Display und einem Joystick für die Benutzer-Eingaben, welches durch seitlich einsteckbare Cartridges mit peripheren Komponenten, wie Sensoren etc., erweitert werden kann.
Oxocard Connect mit Air Cartridge
Die Programmierung kann wieder über den komfortablen Nanopy-Editor erfolgen. Zahlreiche Programmbeispiele und ausführliche Erläuterungen dienen der Einarbeitung und Auseinandersetzung mit diesem System. Zum näheren Kennenlernen möchte ich Sie auf den Beitrag von David Lee verweisen.
Ich möchte Oxocard Connect nicht mit Python programmieren, sondern diesen sehr ansprechend gestaltetem Controller mit der Arduino-IDE programmieren. Die zahlreichen Libraries ermöglichen die Erweiterung mit Sensoren und die Vernetzung sehr komfortabel. Mit dem Veroboard lassen sich Prototypen sehr einfach erstellen, bevor man mglw. eine anwendungsspezifische Cartridge erstellt.
Oxocard Connect Arduino Test
Für die Hardware-Konstellation habe ich ein Testprogramm erstellt, welches die folgenden Funktionen testet:
Ausgabe auf dem farbigen TFT-LCD mit 240 x 240 Pixel LH133T-IG01 mit ST7789VW LCD-Controller
Abfrage Joystick
LEDs über digitale IO
EEPROM über I2C-Bus
Auf der Cartridge stehen neben digitaler und analoger IO und I2C-Bus auch noch SPI zur Verfügung. Ausserdem kann die gesamte Schaltung auch extern mit 5V (VEXT) versorgt werden.
Der Einsatz eines so ansprechend gestalteten Controllers lässt schnell das oft vorhandene Drahtverhau mit seinen unsicheren Verbindungen vergessen.
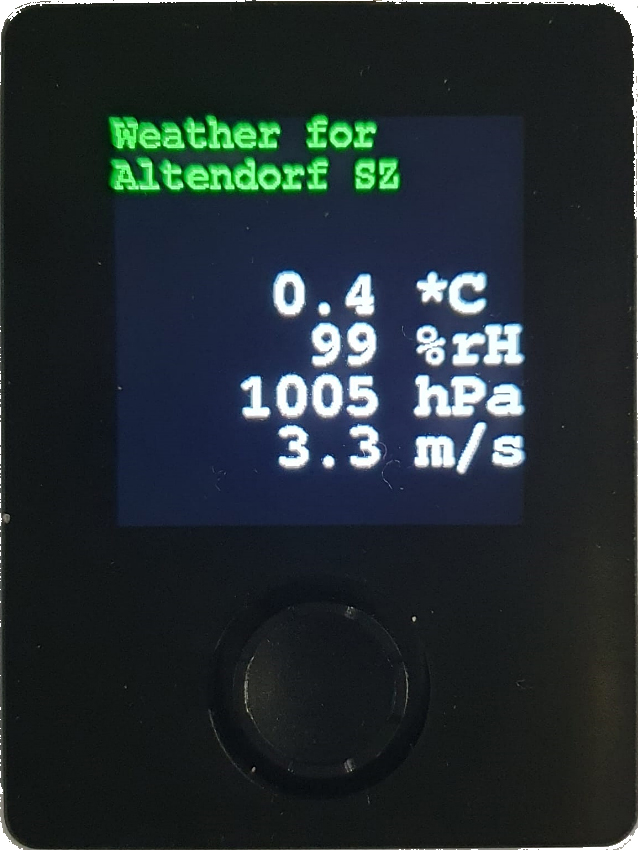
Oxocard Connect Openweather Station
Oxocard Connect besitzt mit der vorhandenen Hardware alle Möglichkeiten, über das Internet auf Daten zuzugreifen und diese auf dem Display darzustellen.
Ich habe hier durch Abfrage der Wetterdaten von Openweathermap.org eine kleine Wetterstation als Anwendungsbeispiel erstellt.
Openweathermap.org stellt maximal 1000 Aufrufe pro Tag gratis zur Verfügung, weshalb hier der Abfragezyklus auf zwei Minuten eingestellt wurde. Werden die 1000 Aufrufe überschritten, dann kann ein blockierter Account die Folge sein.
Simon Kemper beschreibt auf LinkedIn die Verbindung von Datacake und Slack zur Benachrichtigung bei kritischen Zuständen etc.
Unter Verwendung des TTN-internen MQTT-Servers bin ich einen anderen Weg gegangen.
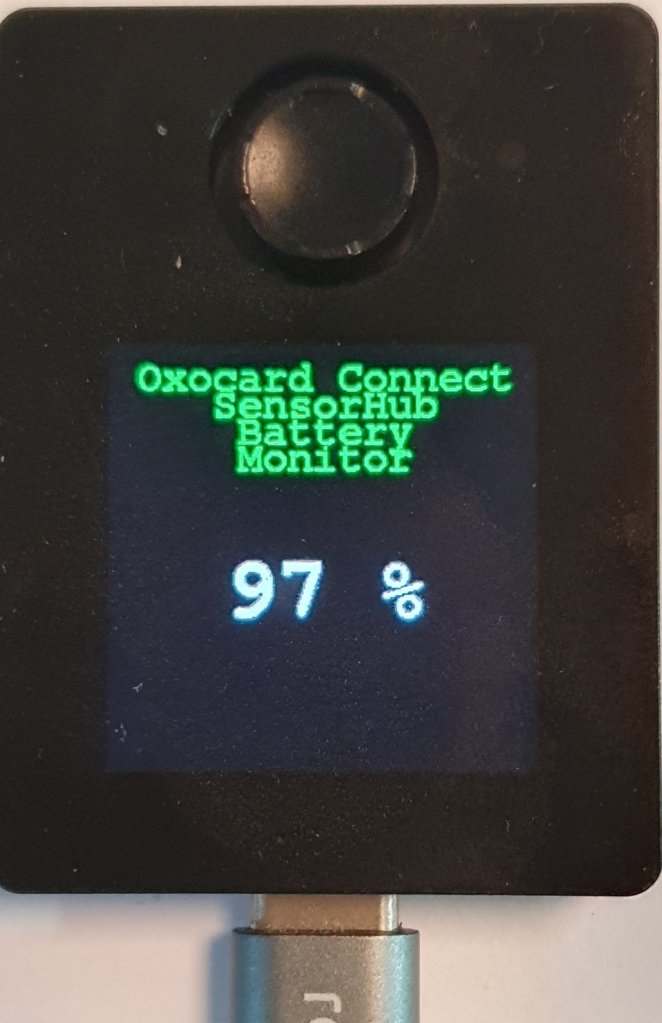
Ich verwende Oxocard Connect als MQTT-Client und filtere nur die für das Monitoring erforderlichen Größen aus den Upload-Messages zur Anzeige auf dem Display.
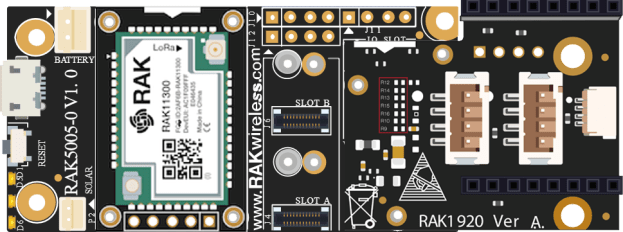
Konkret überwache ich die Batteriekapazität eines solar-gepufferten SensorHubs von RAKwireless. Gerade jetzt in der dunklen Jahreszeit möchte ich den Ladezustand der Batterie überwachen, um die Nachladung tagsüber zu verifizieren.
Der SensorHub sendet die erfassten Umweltdaten zum TTS (CE) LNS, der diese an ein Datacake Dashboard zur Visualisierung weiterleitet. Sie finden dieses Dashboard über diesen Public Link.
Der Oxocard Connect MQTT-Client „subscribed“ die Upload-Messages des SensorHubs, filtert die Batteriekapazität aus der umfangreichen Upload-Message und bringt sie auf dem Display zur Anzeige. Die Aktualisierung des Displayinhalts erfolgt mit jeder neuen Upload-Message vom SensorHub.
Ein Screenshot des Consolen Outputs zeigt die empfangene Payload vor und nach der Filterung und die Extraktion der Daten. Auf dem Display wird aber nur die aktuelle Batteriekapazität angezeigt.
WisBlock ist eine modulare Open-Source-IoT-Entwicklungsplattform, die von RAKwireless entwickelt wurde. Sie wurde entwickelt, um eine schnelle und einfache Möglichkeit zur Entwicklung von IoT-Produkten zu bieten, und kann zur Erstellung verschiedener Arten von IoT-Produkten wie Smart Home, Industrie- und medizinische Geräte verwendet werden. WisBlock Core sind Mikrocontroller-Module mit integrierter WiFi-, BLE-, LoRaWAN- bzw. NFC-Konnektivität und bieten verschiedenen I/O-Optionen. WisBlock Base ist das Basisboard für Block Core und die WisBlock Module. Die Module können miteinander verbunden werden, um ein komplettes IoT-System zu erstellen.
WisBlock is a modular open-source IoT development platform developed by RAKwireless. It is designed to provide a fast and easy way to develop IoT products and can be used to create various types of IoT products such as smart home, industrial and medical devices. WisBlock Core are microcontroller modules with integrated WiFi, BLE, LoRaWAN, or NFC connectivity and offer various I/O options. WisBlock Base is the baseboard for WisBlock Core and the WisBlock modules. The modules can be connected together to create a complete IoT system.
IoT-Projekte für Maker ist ein eBook mit dem Sie Wisblock von RAKwireless an Hand praktischer Anwendungen kennenlernen können.
Das eBook ist so angelegt, dass es bei neuen Anforderungen oder neuen Komponenten im WisBlock System erweitert wird.
Haben Sie sich für den Kauf dieses eBook entschieden, dann erhalten Sie die Updates nach Registrierung kostenlos. Die in der Arduino IDE erstellten Anwendungsbeispiele finden Sie auf GitHub.
IoT Projects for Makers is an eBook with which you can learn Wisblock from RAKwireless using practical applications.
The eBook is designed to expand as new requirements or components are added to the WisBlock system.
If you have decided to purchase this eBook, you will receive free updates after registration. The application examples created in the Arduino IDE can be found on GitHub.
Schon heute setzen wir uns mit zunehmender Tendenz mit automatisierten Abläufen, Algorithmen und vernetzten Gegenständen im Alltag auseinander. Künstliche Intelligenz wird Prozesse unterstützen und möglicherweise auch irgendwann autonom übernehmen.
Auf diese Entwicklungen vorbereitet zu sein, um sie zu beherrschen, zu gestalten und weiter zu entwickeln bedarf es mehr als einen IT-Grundkurs im Gymnasium oder Studium. Wichtig ist es, die Chance zu haben, in diese Welt und das damit verbundene Denken hineinzuwachsen.
In einigen Ländern wurde das frühzeitig erkannt und durch entsprechende Initiativen gefördert. Die Idee ist, jedes Kind zu inspirieren, seine digitale Zukunft zu gestalten und die Maker-Bewegung in den Unterricht zu bringen.
Im Schweizer Lehrplan 21 wird der heutigen Lebenswelt von Kindern und Jugendlichen entsprochen, die „durchdrungen (ist) von traditionellen und digitalen Medien sowie von Werkzeugen und Geräten, die auf Informations- und Kommunikationstechnologien basieren und die durch ihre Omnipräsenz neue Handlungsmöglichkeiten und neue soziale Realitäten schaffen“ (https://v-fe.lehrplan.ch/index.php?code=e|10|2). Abgestimmt mit dem Lehrplan 21 steht mit der Oxocard ein mit WiFi ausgestatteter Computer zur Verfügung, der auch bereits über den Browser programmiert werden kann. Auch in Deutschland und Grossbritannien werden solche Aktivitäten durch Hard- und Software für den Einsatz in der Schule unterstützt.
„Unser Anspruch ist, dass jeder Schüler und jede Schülerin in der dritten Klasse in Deutschland so ein Ding in die Hände bekommt“, sagt Stephan Noller, einer der Gesellschafter von Calliope. „Es soll nicht irgendein Leuchtturmprojekt in Berlin-Wedding werden, sondern wir wollen in die Fläche – und zwar jedes Jahr von Neuem.“
So unterschiedlich die Angebote sind, eines haben sie gemeinsam: Sie werden von Menschen organisiert, die mit großer Begeisterung ihr Wissen rund um Programmierung und digitale Themen an Kinder und Jugendliche weitergeben. Bei den Machern um BBC micro:bit, Calliope mini und Oxocard ist diese Begeisterung zu spüren.
Ich möchte mich hier auf den technischen Bereich beschränken. Für ideologische Auseinandersetzungen sind andere besser geeignet.
Die folgende Tabelle zeigt eine Gegenüberstellung der technischen Merkmale der drei hier betrachteten Mikrocontrollerboards.
Mikrocontroller Board
BBC micro:bit
Calliope mini
Oxocard
Herkunft
UK
D
CH
Hauptmerkmale
Nordic nRF52833, BLE, Radio Motion Sensor (ST LSM303AGR) 5×5 LED Matrix Display (rot) 2 Taster 19 GPIO Piezo-Lautsprecher MEMS Mikrofon USB Micro B Anschluss (Programmierung und Stromversorgung) JST Batterieanschluss (3.3V) Temperatursensor (on-chip NRF52)
Nordic nRF51822, BLE, Radio Motion Sensor (Bosch BMX055) 5×5 LED Matrix Display (rot) DC Motortreiber (TI DRV8837) Piezo-Lautsprecher MEMS Mikrofon Neopixel (WS2812b) 2 Taster 8-11 GPIOs, PWM, 4 x analog UART + SPI + I2C USB Micro B Anschluss (Programmierung und Stromversorgung) JST Batterieanschluss (3.3V) 2 Grove Stecker (I2C + Seriell/Analog)
Espressif ESP32, BLE, WiFi Motion Sensor (ST LIS3DE) 8×8 Neopixel Matrix Kopfhörerbuchse für 8bit-Audioausgabe (mono) Mikrofon (PDM) NeoPixel Data-Out 6 Taster 6 GPIOs UART + SPI + I2C USB Micro B Anschluss (Programmierung und Stromversorgung) LiPo-Akku Anschluss für Grove I2C-Hub Temperatursensor (on-chip LIS3DE)
Programmier- umgebungen
MakeCode, MicroPython, JavaScript
MakeCode, Swift, abbozza! Calliope (basiert auf Blockly), C/C++ (Segger), MicropPython
Blockly, Oxoscript, Arduino (C/C++), MicroPython.
BBC micro:bit, Calliope mini, Oxocard – im Vergleich
Wie aus den Hauptmerkmalen abzuleiten ist, stellen alle drei Boards eine vergleichbare Infrastruktur bereit. Auf markante Unterschiede will ich im Folgenden eingehen. Eine Betrachtung der Ausgangsversionen von BBC micro:bit und Calliope mini hatte ich in einer früheren Veröffentlichung (https://www.elektroniknet.de/embedded/hardware/mikrocontroller-nicht-nur-fuer-die-schule.150415.html) bereits vorgenommen.
Herausstechendes Merkmal beim BBC micro:bit ist seine an der Unterkante des Boards befindliche als Goldfinger bezeichnete Anschlussleiste. Hier können zahlreiche Erweiterungsboard direkt angeschlossen werden. Einen guten Überblick zu diesen Erweiterungen finden Sie unter https://shop.pimoroni.com/collections/micro-bit-uk.
BBC mirco:bit v2
Beim Calliope mini wollte man den Goldfinger nicht übernehmen, da wegen der viel zu eng liegenden Kontakte im Schuleinsatz mit ständigen Kurzschlüssen durch die Schüler gerechnet werden müsste. Es wurden auf dem Board Erweiterungen, wie RGB-LED (Neopixel) und Motortreiber (H-Brücke) u.a., vorgesehen. Zusätzlich stellen die beiden Grove-Connectoren einen I2C-Bus, einen UART-Anschluss sowie einen analogen Eingang zur Kontaktierung von Sensoren oder Aktoren des umfangreichen Grove-Systems zur Verfügung. Eine gute Übersicht zum Grove-System bietet ein Grove Wiki von Seeedstudio (https://wiki.seeedstudio.com/Grove_System/).
Calliope mini v2
Die Oxocard geht einen etwas anderen Weg. Die elektronischen Interna sind gut verpackt in einem Kartongehäuse. Durch den Einsatz eines ESP-32 steht neben BLE auch WiFi zur Verfügung, wodurch Internet-Konnektivität gegeben ist. Durch diese Option ist es möglich IoT-Projekte zu realisieren. Der LiPo-Akku sorgt dann für einen gewissen Zeitraum sogar für autonome Einsatzmöglichkeiten ohne externe Spannungsversorgung.
Nach außen hin stehen die sechs Taster und die 8×8 Neopixel Matrix für Experimente zur Verfügung. Durch die Verwendung der internen Sensoren kommt der Anwender erstmal vollkommen ohne elektrische Verbindungen nach außen aus.
Kommuniziere Meldungen zwischen Oxocards, hol dir Daten aus dem Internet oder stelle deine Karte als Sensor anderen zur Verfügung. All das ist ohne Erweiterungen möglich.
Oxocard mit Kartongehäuse
Für den Maker von Interesse sind natürlich die Erweiterungsmöglichkeiten. Ergänzend zum Lieferumfang der Oxocard ist der OXOCARD i2C-Hub-Erweiterungsport verfügbar.
Lieferumfang Oxocard
Der Oxocard I2C Hub ist ein kleiner Bausatz, um der Oxocard relativ einfach das Anschließen von beliebigen I2C-Grove- Komponenten zu ermöglichen. Mit diesem I2C-Hub können Sie die Oxocard mit zusätzlichen GROVE-kompatiblen Sensoren und Aktoren erweitern. Außerdem kann über eine Buchsenleiste der SPI-Port nach außen geführt werden.
SPI- und I2C-Bus an der Oxocard
Mit diesen Erweiterungsmöglichkeiten ist die Oxocard ein für den Schulbetrieb geeigneter, komplett ausgestatteter und erweiterbarer Mikrocontroller, der als einziger Internet-Zugriff aufweist.
Allen drei vorgestellten Boards gemeinsam ist neben der grafischen Programmierung in MakeCode resp. Blockly die Programmierung in MicroPython.
Das ganze $23.90 kostende Sipeed Maixduino Kit for RISC-V AI + IoT ist seit geraume Zeit im Haus und hat auf die Inbetriebnahme gewartet. Ziel für mich war, das Board in der Arduino-Umgebung in Betrieb zu nehmen, um einen direkten Vergleich zu anderen Arduinos zu bekommen.
Zum Lieferumfang des Maixduino Kits gehören die folgenden Komponenten:
Maixduino Board (rechts)
2.4 inch TFT Display (Mitte)
OV2640 camera module (links)
Komponenten des Maixduino Kits
Die Frontseite des Maixduino Boards zeigt an Hand der Buchsenleisten Kompatibilität zum Arduino-Formfaktor und die Rückseite zeigt in einem Blockdiagramm die zur Verfügung stehenden Ressourcen.
Neben der eigentlichen Inbetriebnahme in der Arduino IDE hat mich vor allem die zu erwartende Performance interessiert.
Um das Maixduino Board der Arduino IDE bekannt zu machen ist der folgende Eintrag in den Preferences vorzunehmen.
Im Boards Manager dann Maixduino (K210) selektieren und die folgenden Board Settings einstellen:
Board: Maixduino
Burn Tool Firmware: open-ec
Burn Baudrate: 1.5 M
Port: Serial port
Programmer: k-flash
Die Programmer Software k-flash wird vom Norton SONAR entfernt. Norton muss hier entsprechend eingerichtet resp. „entschärft“ werden. Die komplette Installation ist unter https://maixduino.sipeed.com/en/get_started/install.html beschrieben.
Um die Performance des Maixduino gegenüber anderen Arduinos resp. Arduino-kompatiblen Mikrocontrollern zu vergleichen, habe ich zwei Benchmarks laufen lassen:
Sieve of Eratosthenes
CoreMark
Den ersten Benchmark habe ich zu Vergleichszwecken verwendet, da ich in der Vergangenheit damit bereits zahlreiche Tests vorgenommen habe:
Hier nun die Resultate der beiden Benchmarks. Verglichen wurden eine Arduino Due (AT91SAM3X8E@ 84 MHz), eine ESPduino-32 (ESP-Wroom-32@80 MHz) und ein Maixduino (Kendryte K210 RISC-V@400 MHz):
Benchmarkergebnisse Sieve of Erastothenes
Benchmarkergebnisse Coremark 1.0
Gegenüber dem Arduino Due hatte der ESP-32 bereits eine deutliche Verbesserung der Performance gezeigt, die aber vom Maixduino noch wesentlich überboten wird. Damit dürfte der Maixduino derzeit der leistungsfähigste Arduino-kompatible Mikrocontroller sein.
Maduino GPRS A6 ist ein kostengünstiger Netzwerkknoten für das IoT. Der Hersteller Makerfabs mit Sitz in Shenzhen, China hat auf dem Board einen Mikrocontroller ATmega 328, ein GRRS/GSM-Modul AI-Thinker A6, ein und ein integriertes Power-Management integriert.
Maduino GPRS A6
Das GRPS/GSM-Modul A6 unterstützt Quad-Band 850/900/1800/1900 MHz, das jedes GSM-Netzwerk abdeckt. In Verbindung mit einer SIM-Karte können Daten über GPRS übertragen werden. In meinem Post 2G für IoT Anwendungen hatte ich hierzu entsprechende Hinweise gegeben.
Das Modul kann über die Arduino IDE programmiert werden. Im Wiki sind Hinweise zur Inbetriebnahme und Programmierung enthalten. Hinweise zu einem Firmware Update sind hier zu finden.
Steht man heute vor der Aufgabe, ein neues Embedded System zu entwickeln, dann wird in den Anforderungen kaum die Anforderung nach einer Netzwerkverbindung fehlen. Dabei spielt es in erster Linie keine Rolle, ob es sich um eine drahtlose oder drahtgebundene Kommunikation handelt, ob die Kommunikation durch die Anwendung genutzt wird oder einen Remote Access für Konfiguration und Service darstellt. Möglicherweise lassen sich diese Dinge auch kaum vernünftig trennen.
Ein Embedded System, welches derartige Anforderungen erfüllen muss, ist mit vernünftigem Entwicklungsaufwand nicht ohne Betriebssystem umsetzbar. Die Suche nach einem für die betreffende Aufgabenstellung geeigneten Betriebssystem umfasst, viele und sehr unterschiedliche Aspekte.
Betrachtet man die Langlebigkeit von Investitionsgütern, dann erscheint schon aus strategischen Gründen der Einsatz eines OS-RTOS zwingend. Einer ersatzlosen Abkündigung eines etablierten, proprietären RTOS kann auf diese Weise der Schrecken genommen werden. In einer gewissen Klasse von Embedded Systems bis hin zu Supercomputern gibt es mit Linux ein ausgezeichnetes Beispiel für ein solches Open Source Betriebssystem.
Damit ist Linux heute ein mächtiges Betriebssystem, welches aber auch gewisser Ressourcen bedarf und für Systeme mit kleinem Footprint, geringen Ressourcen und möglichst für Batteriebetrieb angepasstem Stromverbrauch weniger geeignet ist.
Analysiert man aus Github Daten für Code Frequency, Commits und Contributions für Contiki, RIOT und Zephyr, dann kann deutlich eine größere Aktivität der Community beim Zephyr OS gegenüber den anderen beiden RTOS verzeichnet werden. Natürlich ist das Zephyr OS auch ein „junges“ RTOS, was nicht in allen Bereichen bereits ausgereift sein kann.
Das Zephyr Project (https://www.zephyrproject.org/what-is-zephyr) ist ein von der Linux Foundation gehostetes Collaboration-Projekt, eine Open Source Zusammenarbeit, die führende Kräfte aus der gesamten Branche zusammenbringt, um mit dem Zephyr OS ein skalierbares Echtzeit-Betriebssystem (RTOS) für mehrere Architekturen ressourcenbeschränkter Geräte zu entwickeln.
Der in der Zeitschrift Design & Elektronik erschienen Beitrag mit dem o.a. Titel (Design & Elektronik 3/2019, S. 42-48 ) soll Einblicke in das Zephyr OS und die Zephyr Entwicklungsumgebung geben. An Hand einiger einfacher und nachvollziehbarer Programmbeispiele wird die Vorgehensweise bei der Programmierung von Anwendungen und der Build Prozess dokumentiert. Die Programmbeispiele selbst sowie dazugehörige Screenshots sind auf Github unter https://github.com/ckuehnel/zephyrtests abgelegt.
Das Zephyr OS ist ein Open Source RTOS, welches durch das von der Linux Foundation gehostete Zephyr Project und die Nähe zu Linux das Potential hat, bei Embedded Systems mit kleinem Footprint in Zukunft vergleichbar erfolgreich zu werden, wie es Linux bei Systemen mit mehr Performance schon länger ist. Der Erfolg wird sicher stark durch die Community geprägt. Ausdauer und Kraft sind der Community zu wünschen. Die zentrale Mailinglist des Zephyr Projects [ https://lists.zephyrproject.org/g/main ] gibt aktuell Auskunft über die laufenden Aktivitäten.