Arduino ist seit vielen Jahren über die Maker-Szene hinaus als Prototyping-Plattform bekant. Sowohl die aus einem Mikrocontroller-Board bestehende Hardware als auch die Arduino-Entwicklungsumgebung (IDE) sind Open Source. Prototyping-Plattformen sind aber nicht ohne weiteres für den industriellen Einsatz geeignet.
Mit CONTROLLINO stehen unterschiedlich ausgestattete Kleinsteuerungen auf Arduino-Basis zur Verfügung, die den industriellen Einsatz nicht scheuen brauchen. Für den industriellen Einsatz besonders wichtig sind die implementierten Schutzmaßnahmen gegen Kurzschluss, Überlast und elektrostatische Entladung und nicht zuletzt die spezifizierten Umgebungsbedingungen.
Zur Arbeit mit dem CONTROLLINO habe ich mir eine Spielwiese eingerichtet, die passend zur Bauform des CONTROLLINO mit Hutschienen-Komponenten arbeitet.
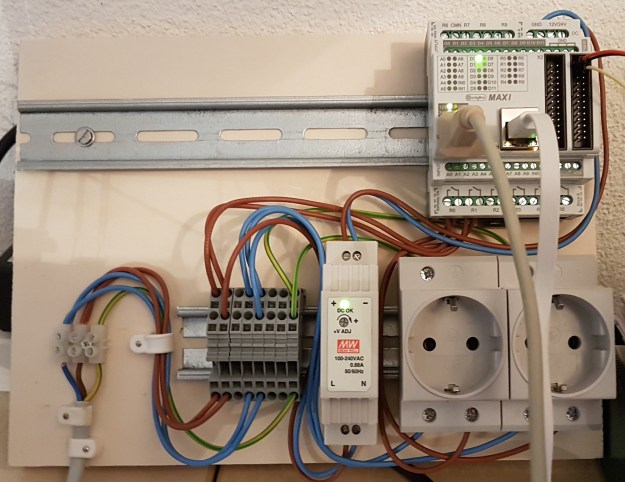
Über den Ethernet-Anschluss ist der CONTROLLINO mit dem Internet verbunden, während über den USB-Anschluss die Verbindung zur Arduino IDE (Programm-Download, Monitoring) vorgenommen wird.
Im Februar 2017 wird der CONTROLLINO in der Zeitschrift Design & Elektronik vorgestellt. Programmbeispiele sind auf Github zu finden.

 Wegen der schwierigen Beschaffung des Raspberry Pi Zero teste ich das System headless für IoT Anwendungen.
Wegen der schwierigen Beschaffung des Raspberry Pi Zero teste ich das System headless für IoT Anwendungen.