Für den ESP32 steht mit MicroPython eine interaktive Programmiersprache zur Verfügung. Das ist aber nicht die einzige Möglichkeit der interaktiven Programmierung, denn mit ESP32Forth steht auch eine Portierung von eForth (Arduino and eForth) für den ESP32 zur Verfügung.
Wenn Ihnen Forth unbekannt sein sollte, dann erlätert ChatGPT Ihnen FORTH wie folgt:
Die Programmiersprache FORTH ist eine ungewöhnliche und spezielle Programmiersprache, die sich von C++ und MicroPython in vielerlei Hinsicht unterscheidet, insbesondere beim Einsatz auf Mikrocontrollern. Hier sind einige der wichtigsten Eigenschaften und Unterschiede:
Eigenschaften von FORTH:
- Stack-basierte Sprache: FORTH verwendet einen Stapelspeicher (Stack) als zentrales Konzept. Operationen und Daten werden auf den Stapel verschoben und von dort verarbeitet. Dies macht FORTH sehr leichtgewichtig und effizient.
- Interaktivität: FORTH ist eine interaktive Programmiersprache. Sie können Code direkt in die FORTH-Umgebung eingeben und ausführen, was sie ideal für den schnellen Prototypenbau und das Debugging macht.
- Minimalistische Syntax: Die Syntax von FORTH ist extrem einfach, bestehend aus Wörtern (FORTH-Befehlen), die von Leerzeichen getrennt sind. Dies führt zu sehr kompaktem Code.
- Keine strikte Typisierung: FORTH ist schwach typisiert und flexibel. Dies kann sowohl ein Vor- als auch ein Nachteil sein, je nach Anwendungsfall.
- Direkter Hardwarezugriff: FORTH ermöglicht einen sehr direkten Zugriff auf die Hardware, was in eingebetteten Systemen nützlich sein kann.
Unterschiede zu C++:
- Sprachparadigma: C++ ist eine objektorientierte Programmiersprache, während FORTH als stapelbasierte Programmiersprache betrachtet wird. Dies bedeutet, dass die Herangehensweise an die Programmierung grundlegend unterschiedlich ist.
- Komplexität: C++ ist eine umfangreiche und komplexe Sprache mit einer Vielzahl von Funktionen und Bibliotheken. FORTH hingegen ist extrem minimalistisch und erfordert oft mehr Zeilen Code, um ähnliche Aufgaben zu erledigen.
- Typisierung: C++ ist stark typisiert, was bedeutet, dass Datentypen streng überprüft werden. FORTH ist schwach typisiert und erlaubt mehr Flexibilität bei der Verwendung von Daten.
Unterschiede zu MicroPython:
- Syntax: MicroPython ist eine Python-Variante für Mikrocontroller und verwendet eine Python-ähnliche Syntax, während FORTH seine eigene einzigartige Syntax hat.
- Abstraktionsebene: MicroPython bietet eine höhere Abstraktionsebene und mehr Konventionalität im Vergleich zu FORTH. Das macht MicroPython oft einfacher zu erlernen und zu verwenden.
- Gemeinschaft und Bibliotheken: MicroPython hat eine aktive Gemeinschaft und eine breite Palette von Bibliotheken und Modulen, die speziell für Mikrocontroller entwickelt wurden. FORTH hat weniger Ressourcen und Unterstützung in dieser Hinsicht.
- Entwicklungsumgebungen: MicroPython wird oft mit modernen integrierten Entwicklungsumgebungen (IDEs) verwendet, die die Entwicklung und das Debugging erleichtern. FORTH erfordert häufig eine tiefere Einarbeitung in die Arbeitsweise des Stapels und der FORTH-Umgebung.
Insgesamt hängt die Wahl zwischen FORTH, C++ und MicroPython für Mikrocontroller-Anwendungen von den spezifischen Anforderungen Ihres Projekts, Ihrer Programmierpräferenz und Ihrer Erfahrung ab. FORTH ist eine leistungsfähige, aber unkonventionelle Option, die für bestimmte Anwendungen geeignet sein kann, während C++ und MicroPython aufgrund ihrer weitverbreiteten Akzeptanz und ihrer Entwicklungsunterstützung oft bevorzugt werden.
OpenAI. (2023). ChatGPT (August 3 Version) [Large language model]. https://chat.openai.com
Wenn Sie sich mit ESP32Forth auseinandersetzen wollen, dann finden Sie die notwendigen Informationen von Installation bis hin zur Anwendung unter https://esp32.forth2020.org/ oder https://www.facebook.com/groups/esp32forth/
Ich möchte Ihnen hier zwei Beispiele zur Arbeit mit ESP32Forth zeigen, die vielleicht helfen Neugier zu wecken.
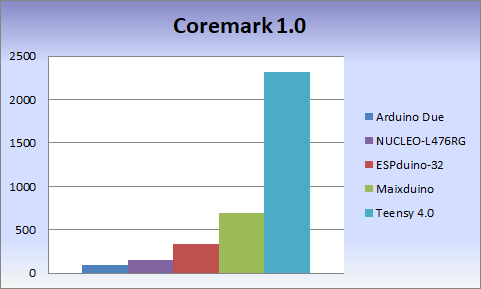
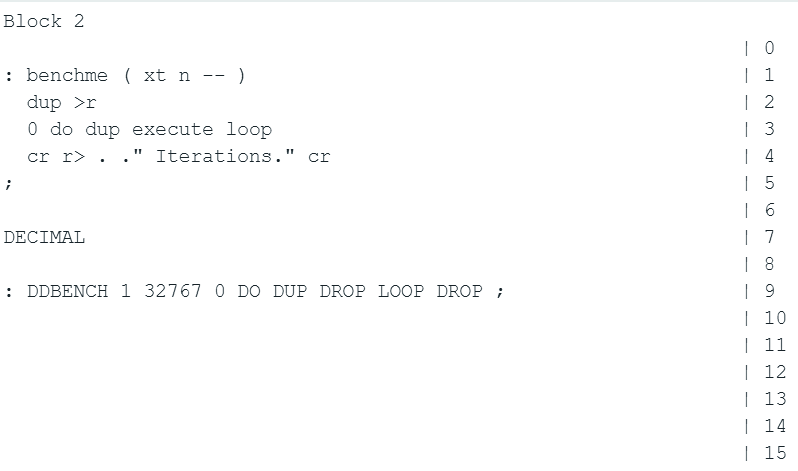
Benchmarks sind eine beliebte Vergleichsmöglichkeit für Hard- und Software. Um einen Eindruck von der Performance von ESP32Forth auf einem ESP32 zu bekommen, habe ich den DDBench(mark) herangezogen (https://theultimatebenchmark.org/).
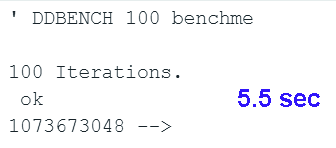
Das Resultat des Benchmarks sind eine Laufzeit von 5.5 Sekunden.
Vergleichen Sie das Resultat mit den unter https://theultimatebenchmark.org/ veröffentlichten Daten, dann können Sie sich ein Bild von der Leistungsfähigkeit dieser Hard- und Softwarekombination machen.
Im Blogpost ESP32 ADC & DAC hatte ich die Performance des DAC-ADC-Subsystems des ESP32 untersucht.
Wenige Zeilen ESP32Forth Code ermöglichen die Ansteuerung eines DACs und das Erfassen dessen Ausgangsspannung durch einen Kanal des ADC. GPIO25 und GPIO33 werden hierzu miteinander verbunden.
( Test ESP32-DAC-ADC-Subsystem w/ ESP32Forth )
25 CONSTANT DAC1 \ GPIO25
33 CONSTANT ADC1_CH5 \ GPIO33
: wait100ms 100 ms ;
: readADC1_CH5 ADC1_CH5 adc . ;
: readADC readADC1_CH5 ;
: writeDAC1 DAC1 swap dacWrite ; ( 0-255 -- )
: test dup writeDAC1 wait100ms readADC . cr ; ( 0-255 -- )
: testloop 255 for i test next ;Die seriellen Ausgaben habe ich geloggt, um diese für die folgenden Grafiken aufzubereiten.
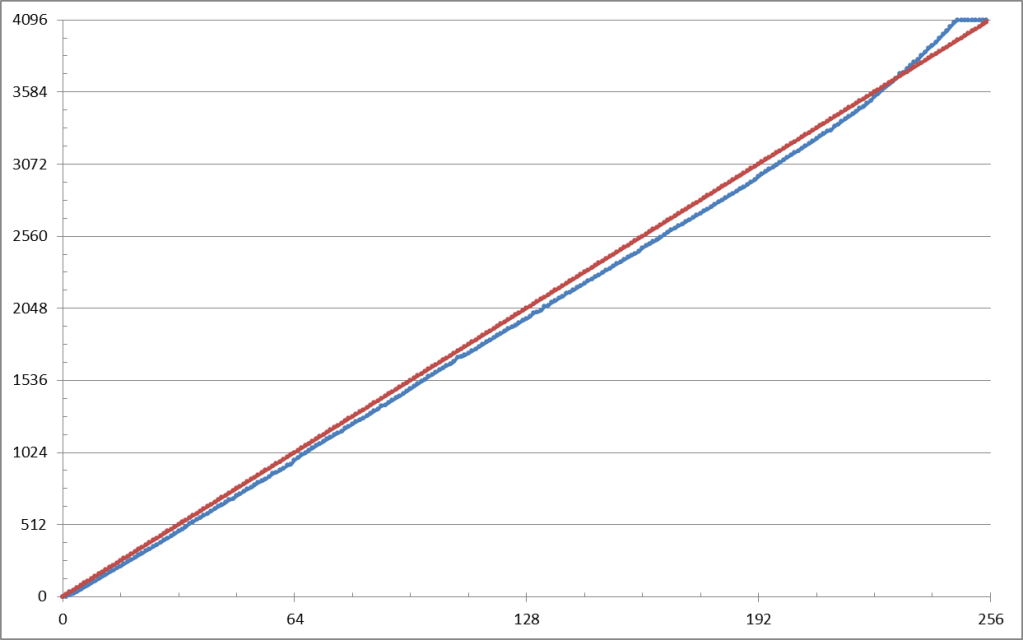

Das Verhalten des analogen Subsystems entspricht den Erwartungen und ist ohne Anpassungen nur bedingt einsatzfähig.
Der einfache Test mit dieser interaktiven Programmierumgebungen wird aber deutlich.
2023-09-14/CK